|
(1)震源・受振器の幾何学的配置 弾性波トモグラフィーはボーリング孔間(クロスホール)及び横坑間等において行われます。 それぞれの震源・受振点配列を図-1(a)及び図-1(b)に示します。   (2)解析方法 高密度弾性波探査は従来の探査に比べて発破点を多く取り高密度のデータを収集します。 弾性波トモグラフィーは波線が速度構造によって屈曲するため、波線追跡を含む非線形解析となります。 解析は図-1に示すように、まず解析領域に一定間隔の格子点を設定し、その格子点ごとに初期速度(一般 には平均速度)を与えます。次にその速度分布に基づいて波線追跡を行ない、それより求められた各受振 点における走時と観測走時の差に関して、各格子点の補正量を計算します。補正された速度構造を用い て再び波線 追跡を行ない、計算走時と観測走時の走時差に関して格子点速度の補正をおこないます。こ のような計算を 繰り返し、走時に関する収束判定基準を満たした時に計算を打ち切ります。 波線追跡は速度を求める格子点間をさらに細分割しこれらの節点を経由して伝わる波のうち、目標点に最 短時 間で到達する波線を求めるヘルマー-ホイヘンス法(羽竜・伝法谷, 2001)を使用します。 逆解析には拡張ベイズ法(羽竜、1997a、1997b、1998)を採用します。 (3)シュミレーション 図-2は断層モデルのシュミレーション結果を示すもので(a)はモデル、(b)は再構成結果(トモグラム)、 (c)は モデルの速度構造に対する波線追跡図です。複雑な構造に対する波線経路がよく追跡され、トモグ ラムもモデ ルをほぼ再現しております。  (4)実施例 図-3は風化花崗岩地帯で実施した弾性波トモグラフィーの結果であります。孔間距離は46m,格子点間 隔1m、 全格子点数2015、データ数461であります。トモグラムは風化花崗岩特有の上部強風化帯とそれ に続くミラージ 構造をよく再現しております。その精度は、地表における屈折法探査、ボーリング孔における 速度検層及び三成 分測定による受振点における地動方向と波線径路の関係等により検証されております。 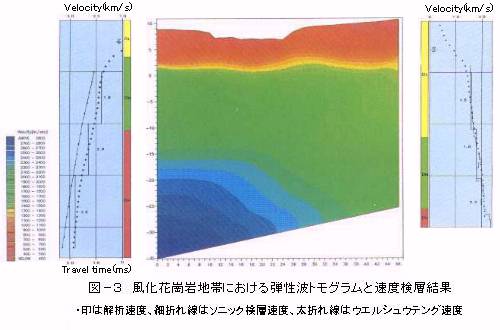
|
